
This Biomimetic Robot Foot is a single-body, soft-robotic design intended for quadrupedal robots. It utilizes the anti-slip mechanism found in the feet of mountain goats to improve stability on harsh terrain.
Team & Support
Solo project with key support from Dr. Sara Abud Guaman (Imperial College, London) and Dr. Thrish Nanayakkara (Imperial College, London)
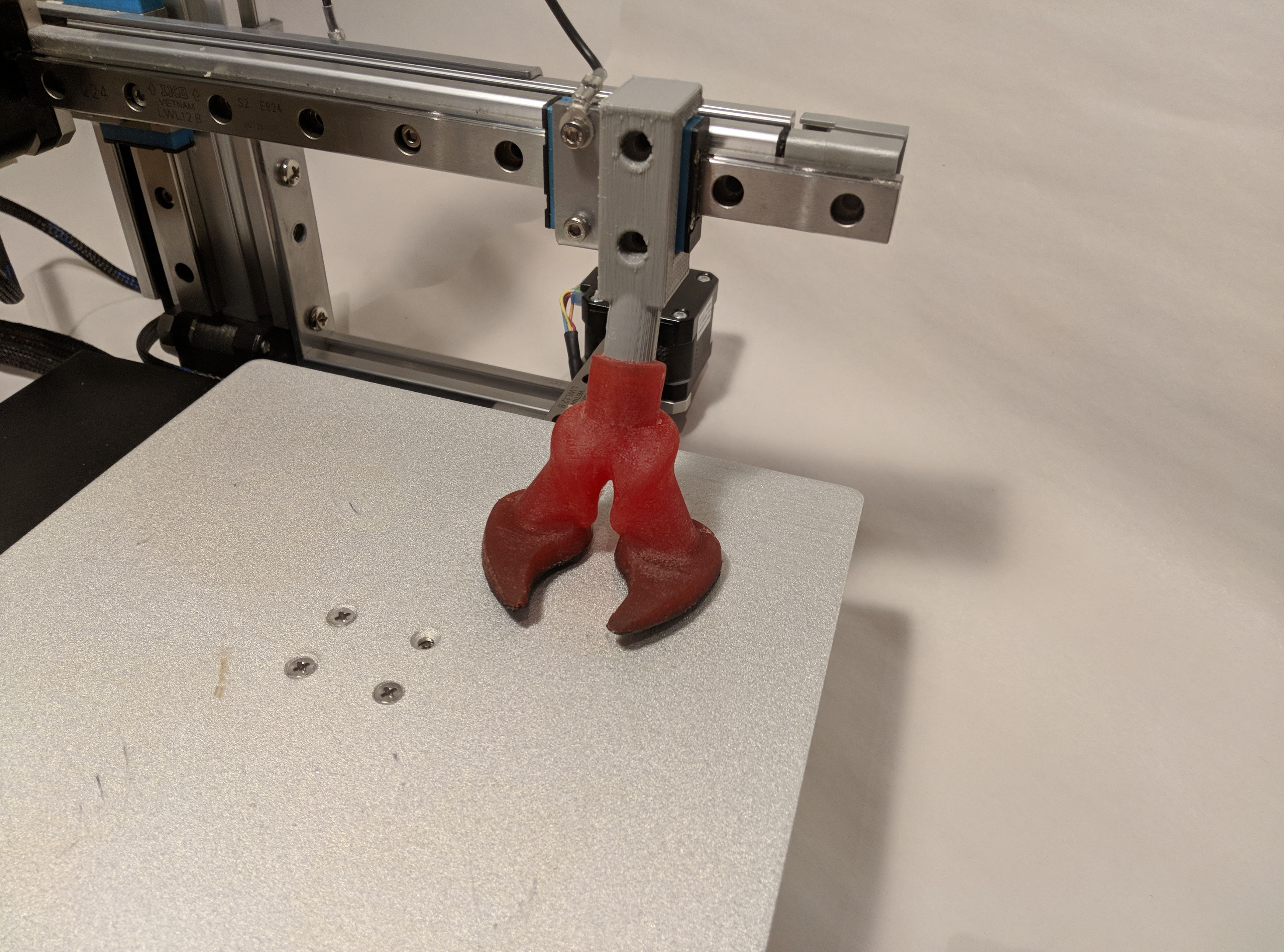
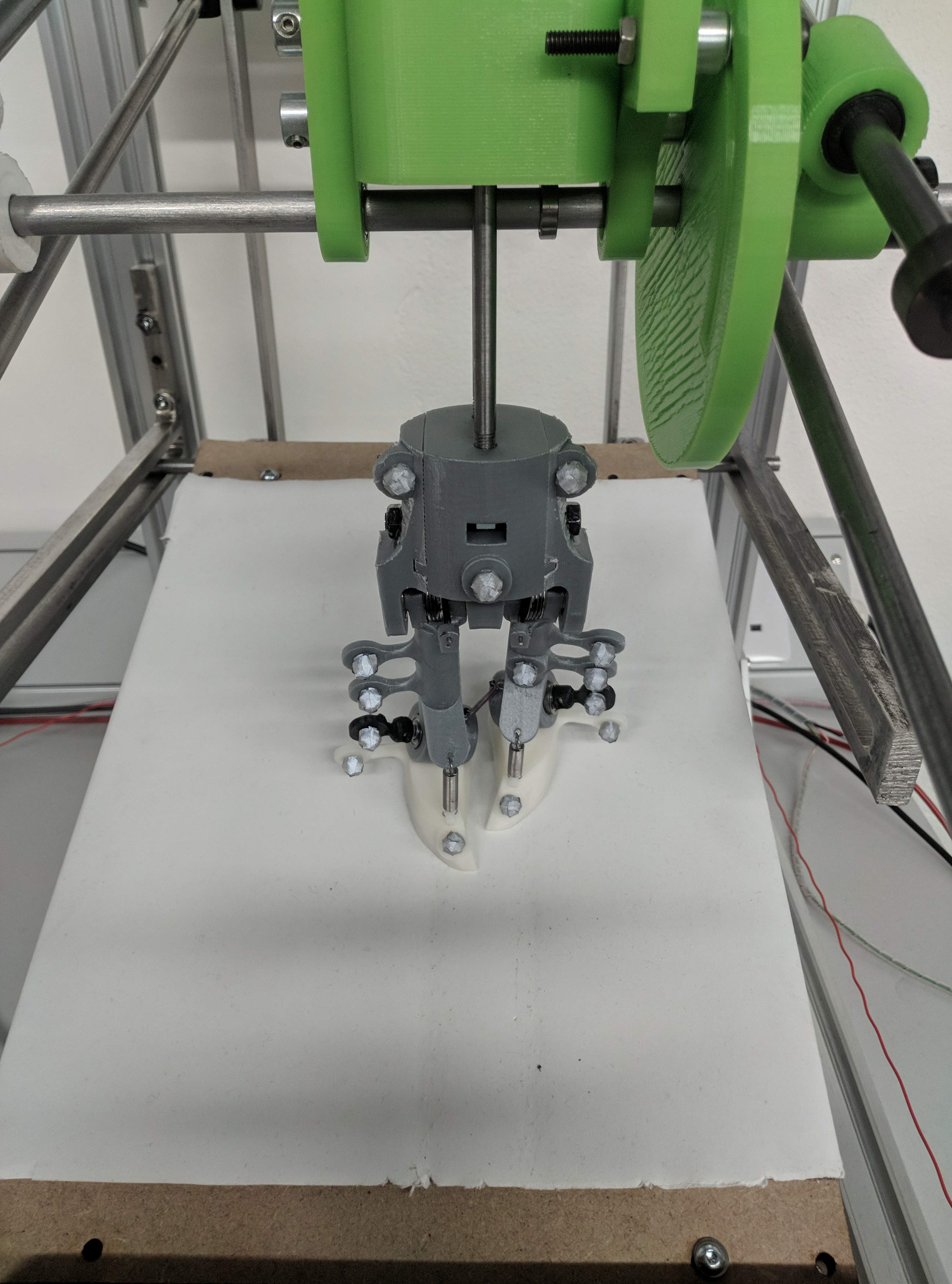
Deformation testing using a modified 3D printer
Background
The hooves of mountain goats are incredible. They exhibit remarkable traction on steep and unstable terrain, giving the creatures the ability to survive in otherwise treacherous conditions. Recently, the Morphological Computing Lab at Imperial College has been able to identify a key mechanism that underlies this ability. This design project explores how we might simplify this mechanism into a practical soft-robotic foot for quadrupedal robots. Robot feet are typically an afterthought in the design of quadrupeds. Roboticists tend to create simple robot feet and rely on slow and complex active stabilization methods in order to compensate for slips or missteps making robots unstable on difficult terrain.
When a mountain goat’s foot slips in the forward direction, its cleft hoof will alternately stick and slip. This action enables the hoof to reposition itself while maintaining a condition of static friction, increasing the amount of work required to slide over the ground. This system is fully passive, not requiring any input from the goat’s central nervous system that would cause a delay in reaction time.
When a mountain goat’s foot slips in the forward direction, its cleft hoof will alternately stick and slip. This action enables the hoof to reposition itself while maintaining a condition of static friction, increasing the amount of work required to slide over the ground. This system is fully passive, not requiring any input from the goat’s central nervous system that would cause a delay in reaction time.
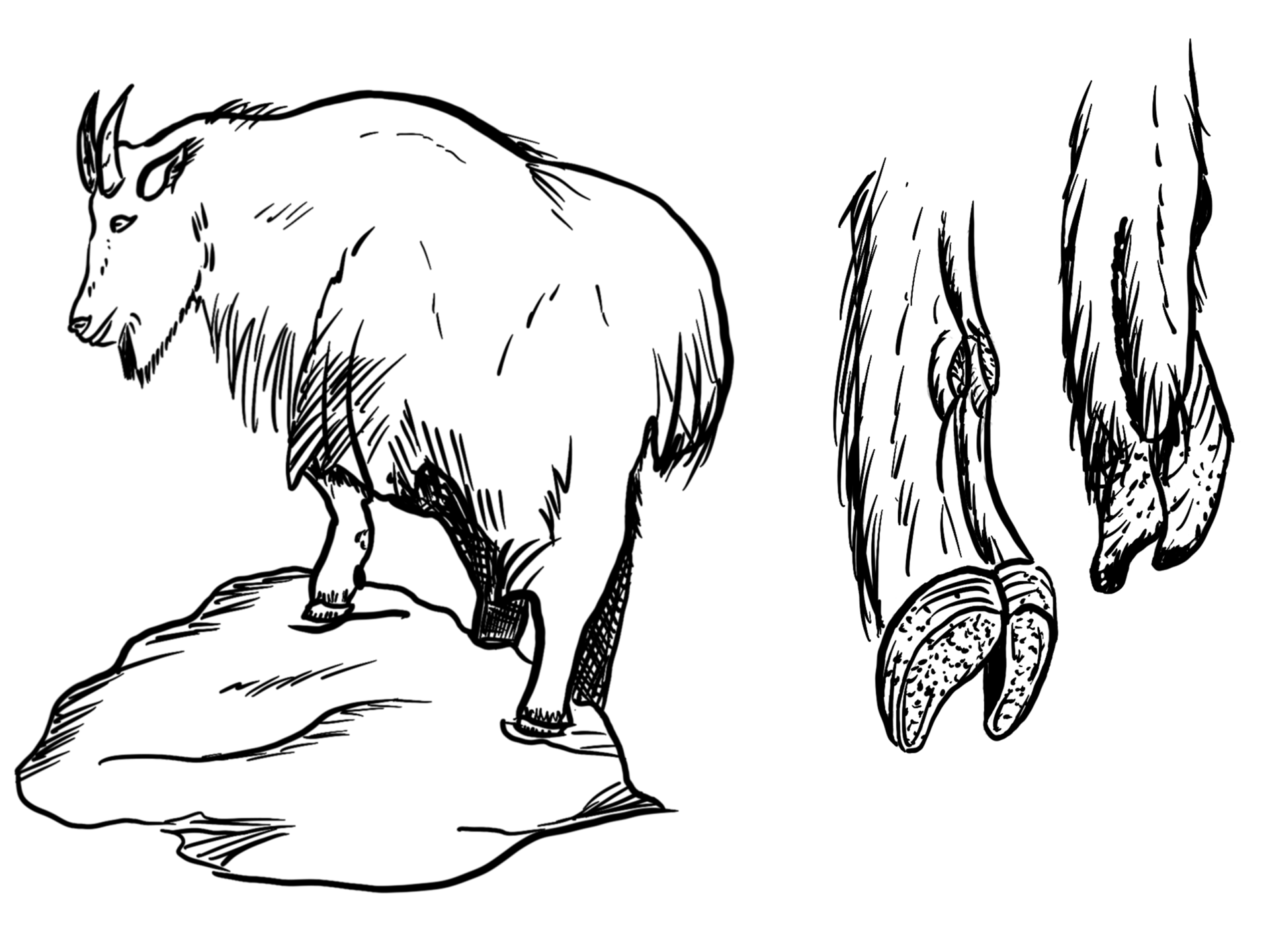
Oreamnos americanus: the American Mountain Goat
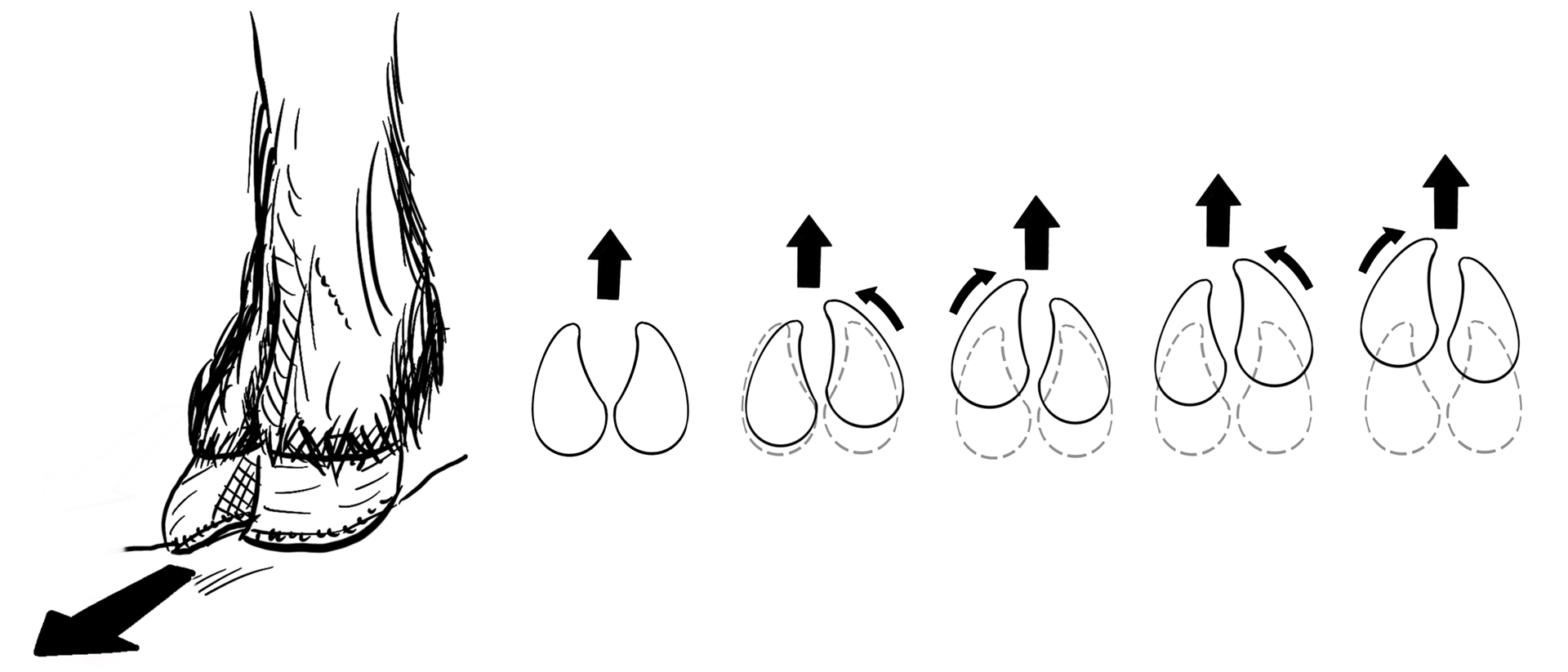
Stick-and-slip action of a goat hoof during forward slip
Medium
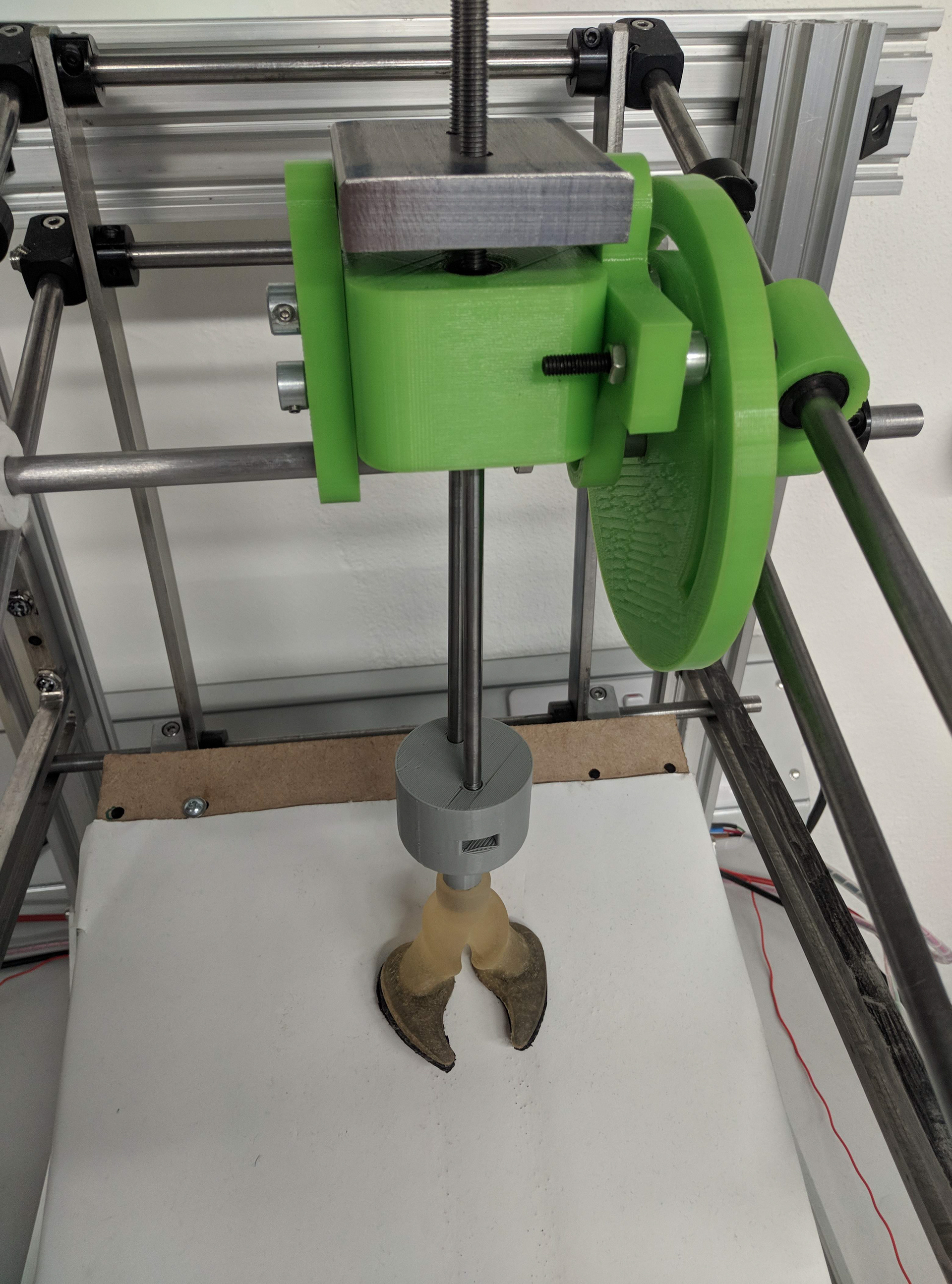
Following experimentation with a range of TPU and PU of varying shore hardnesses, the final device is molded from a SH70 polyurethane to provide the right balance of flexibility and hardness to enable oscillations during slip without allowing buckling.
Embodiment
Researchers at the Morphological Computing Lab identified medial rotation as well as flexion and extension of the claws as being essential for instigating the stick and slip action that underlies the goat’s incredible traction. The final design comprises tear-drop shaped contact points combined with a set of inward-facing helix structures. This geometry encourages medial rotation and discourages lateral rotation of the claws during forward slip.
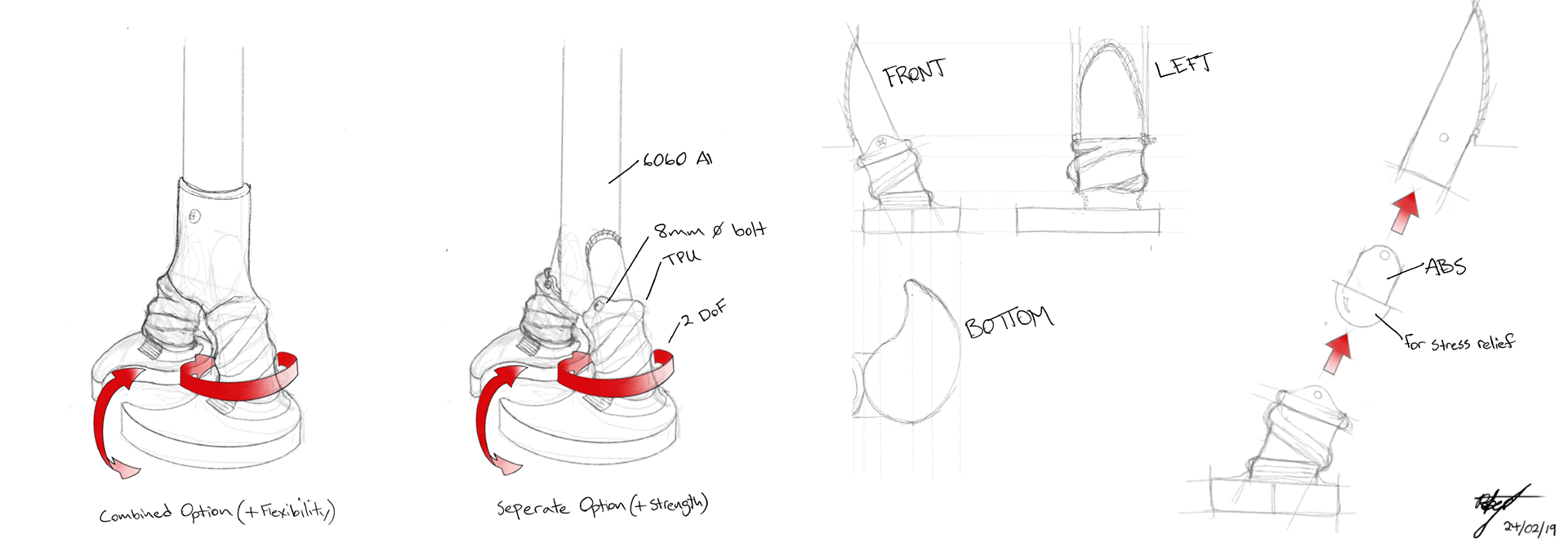
Early concept drawings
Testing apparatus from Dr. Abad-Guamán's experiments

3D modelling and concept development

Mold making

Prototype with SH70 hardness level

A number of prototypes of various hardness levels and the mold inner (light grey)

Testing a prototype made with SH85 hardness level polyurethane
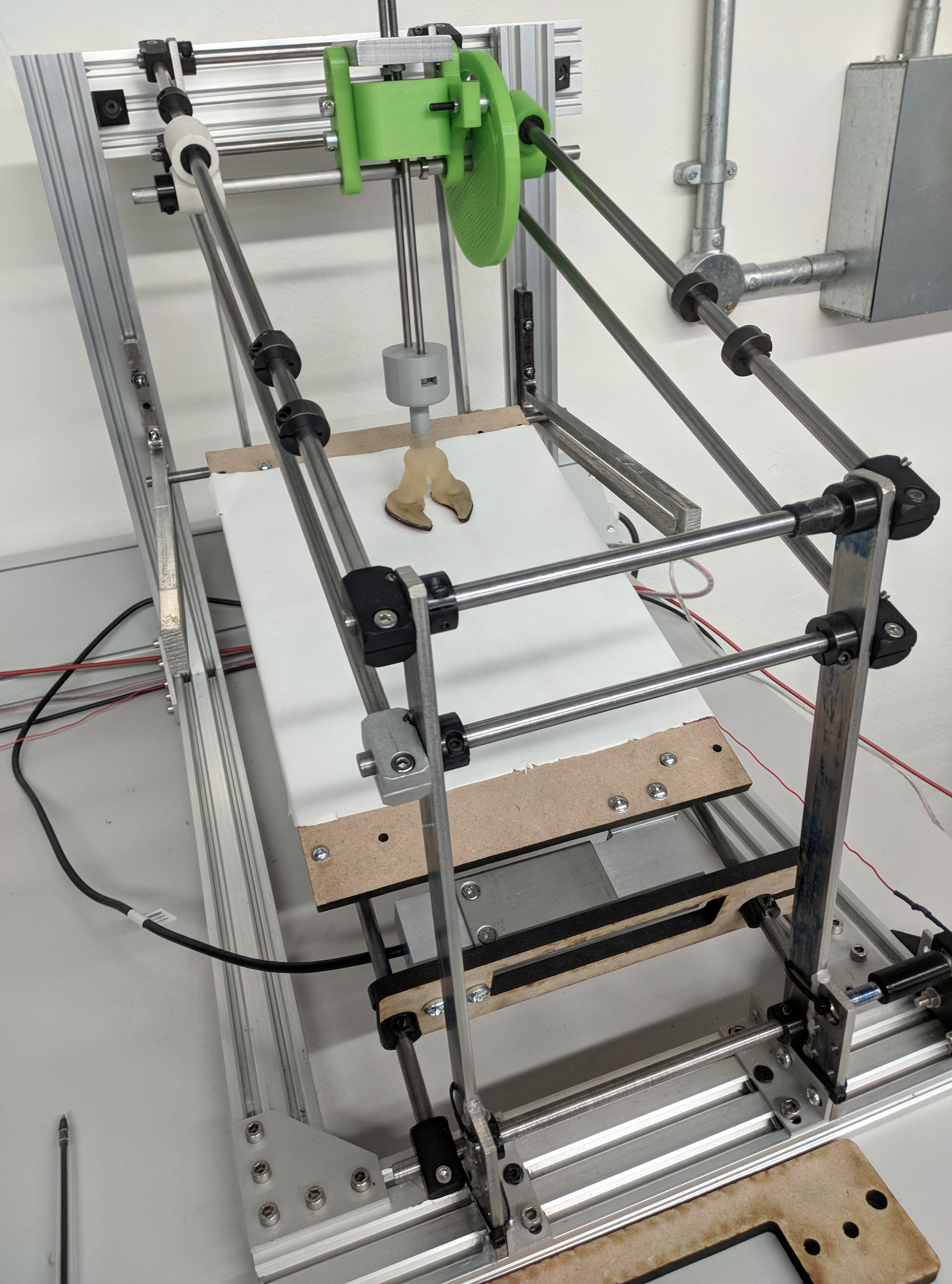
Slip-resistance test
Slip-resistance test
